


 通过认证
通过认证 

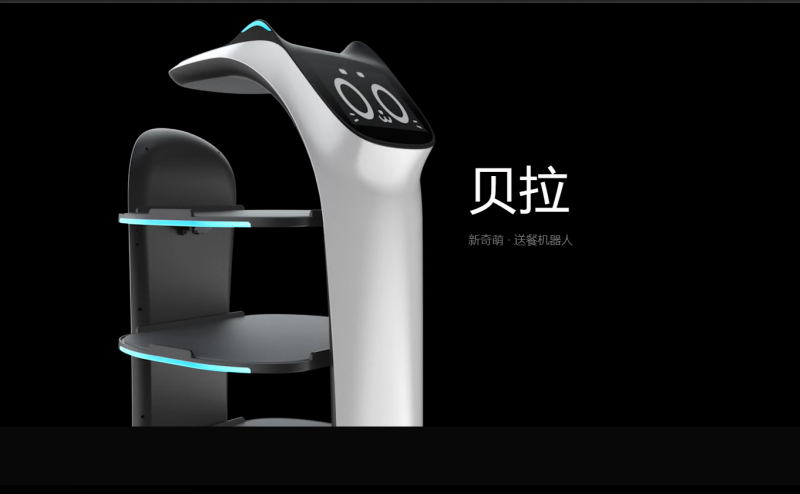



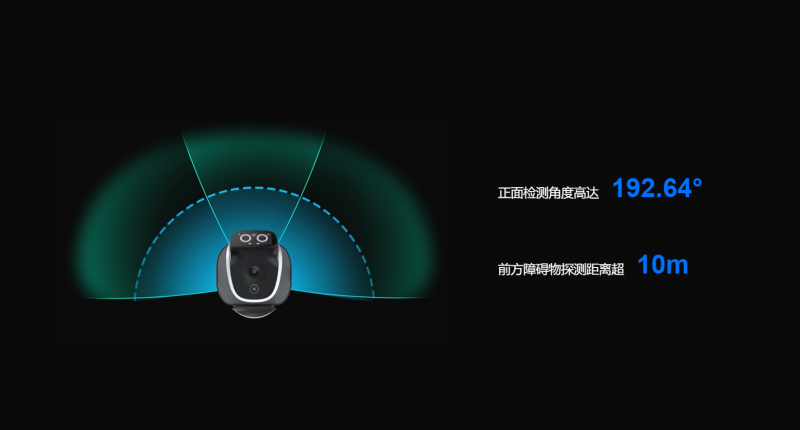

PUDUSLAM是普渡科技自主研发的多传感器融合SLAM算法,采用了视觉摄像头、激光雷达、IMU、编码器、RGB-D深度摄像头、超声波雷达等多种传感器的结合,能实现厘米级的即时定位与高精度的地图构建,在餐厅这类复杂、混合场景也能运行。为追求更高的安全性,“贝拉”搭载3D传感器,配合全新模块化底盘,任意角度,遇障即停,随转即走。

|
公司基本资料信息
|
|||||||||||||||||||||||||||
PUDUSLAM是普渡科技自主研发的多传感器融合SLAM算法,采用了视觉摄像头、激光雷达、IMU、编码器、RGB-D深度摄像头、超声波雷达等多种传感器的结合,能实现厘米级的即时定位与高精度的地图构建,在餐厅这类复杂、混合场景也能运行。为追求更高的安全性,“贝拉”搭载3D传感器,配合全新模块化底盘,任意角度,遇障即停,随转即走。










