



 [VIP第5年] 指数:4
[VIP第5年] 指数:4 通过认证
通过认证 
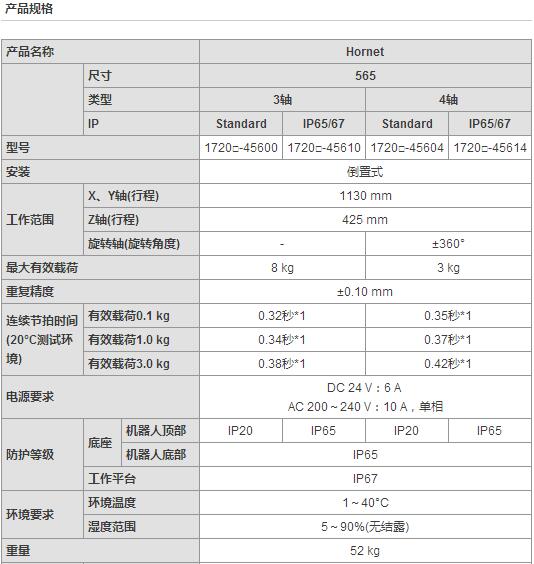
Hornet 565 17201-45604
特点
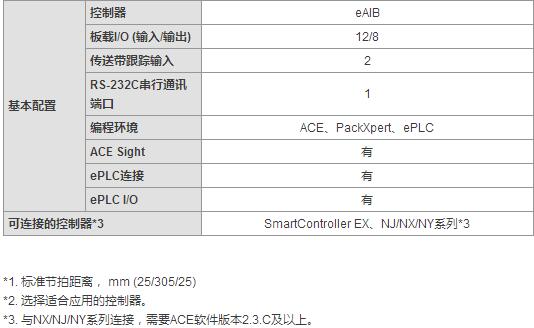
通过广泛使用的控制器NJ/NX/NY系列编程语言(IEC 61131-3),Ethernet可直接控制机器人
嵌入式驱动控制,可减少电缆数量
高达1.4 m/s的传送带跟踪速度
采用高载荷能力设计,支持各种抓手(多个抓取)
支持在传送带上快速抓取与放置
有效降低安装成本和机器人振动
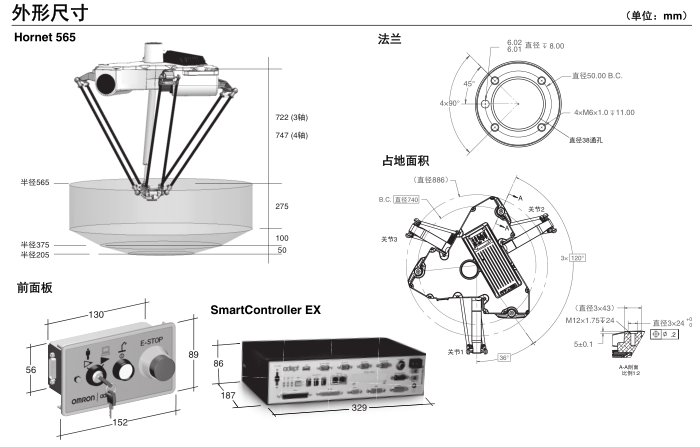
*大工作直径1,130 mm
工作高度425 mm
*大有效载荷8 kg
重量52 kg
机器人部件代码与随机附件
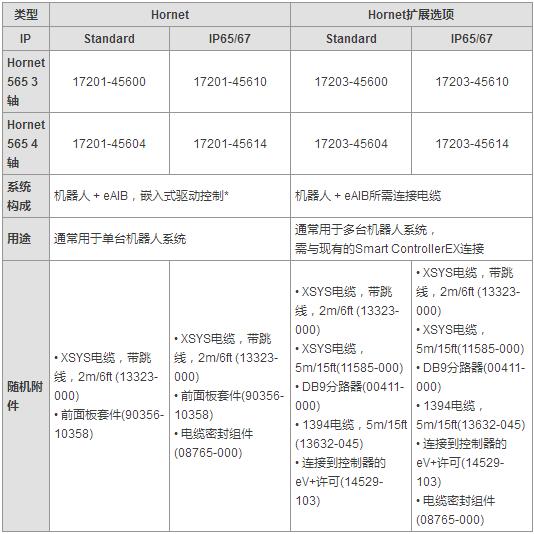
如需传送带跟踪,则需要增加Smart Controller EX控制器(19300-000),工控机及相关电缆。