
 资讯
资讯


两种类型的“机器人”驾驶:自动驾驶和DARPA机器人比赛
但是人形机器人驾驶汽车的研究也是有很重要的意义的:2015年在美国举办的DARPA机器人挑战赛里就有一项机器人充当司机驾驶吉普车的任务。小编私以为,研究人形机器人可以提升人形机器人的功能性,驾驶作为一个需要综合多方面因素的任务(集合机器人设计,运动控制,人工智能算法等),可以很好的作为一个特定的研究课题来提升人形机器人的综合性能;另外,研究人形机器人驾驶还将成果转移到开发相应的机械臂或者机械腿,来为肢体有残缺的人士提供可靠的功能性的智能义肢,让他们能够拥有和其他人一样的生活和运动能力。

呆萌的老司机Musashi人形机器人
近期来自日本东京大学的研究团队基于他们之前的人形机器人的研究,研发了一款用于驾驶汽车的人形机器人司机,并将研究成果刊登于国际机器人期刊《IEEE机器人与自动化杂志(Robotics and automation magazine)》,论文信息请看文末。这位机器人老司机名叫Musashi,不同于大多数人形机器人依靠关节电机驱动,Musashi被设计为具有像人一样的肌肉-骨骼结构。他全神具有74块人工肌肉,以及39个关节(不包括手部的关节)。而本研究的亮点也就是尽量模仿人类的动作和功能来实现机器人的自动驾驶。(东京大学的人形机器人团队曾经于2017年刊登一篇《科学机器人学》(Science Robotics)封面文章,详细讲解了他们的“肌肉-骨骼”人形机器人系统设计,感兴趣的可以参考文末的论文链接。)
我们先来欣赏一下“机器人老司机”的一些镜头!文末附有完整的视频。在下一部分会为大家介绍如何设计以及实现人形机器人驾驶。
单手玩儿方向盘,不安全噢!
双手转方向盘,这才是正确操作吧!
踩油门
细节动作:拧钥匙,拉手刹,打转向灯

后视镜识别人
培训完成,老司机上路啦!
二. 类人机器人的“骨骼肌肉”系统设计以及控制
“肌肉-骨骼”机器人Musashi模仿人类的身体结构设计和制造,具有冗余的传感器和柔性的身体结构。这些特性非常适合在复杂的环境中交互,例如在狭小的汽车中驾驶的行为。研究者期望设计的机器人能够坐到汽车座位中,并且可以用脚踩刹车和油门,同时可以用双手操作方向盘。为了实现上述的目的,研究者需要从硬件和软件等多个方面综合设计这款机器人,具体包括:1. 机器人身体比例;2.机器人身体的柔性;3. 冗余传感系统和一个可以控制机器人“智能系统”。
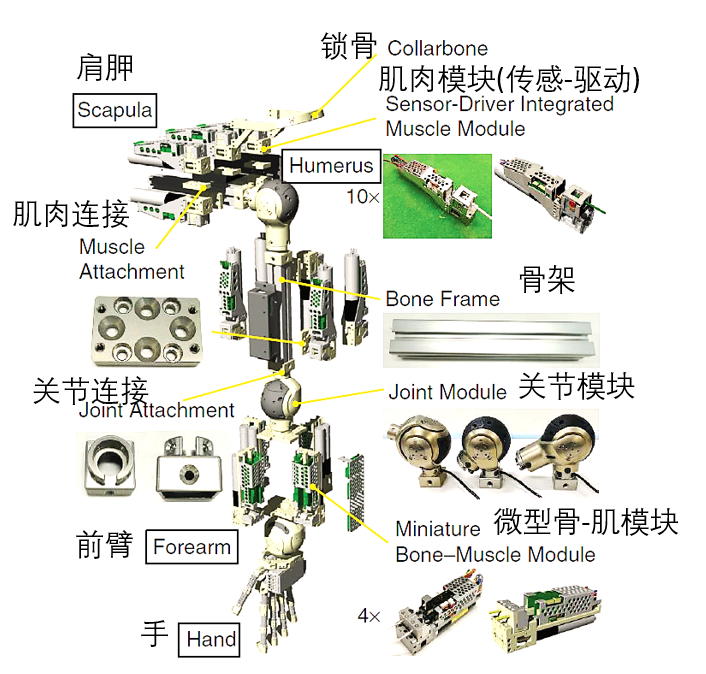
研究者对Musashi的肌肉模块驱动器进行了重点设计和研发。柔性的“人工肌肉”是本研究中的硬件核心所在。肌肉模块是由电机通过滑轮绕线驱动,为了让机器人有一定的自体柔性,研究者们在每一个“人工肌肉”末端添加了一个非线性弹性单元(NEU)。非线性弹性单元由一个纤维增强的弹性圈充当,自身具有柔性,非常适合于环境交互。每一个肌肉驱动单元都含有可以测量肌肉张力,肌肉温度以及肌肉长度的传感器。肌肉模块连接到骨架上,非线性弹性单元连接到肌肉末端。像人类一样,Musashi的关节由一对肌肉模块以对抗(antagonistic)的形式安装驱动。

驱动单元设计
机器人的手臂结构如图,Musashi的手臂基本上是按照人类的手臂进行设计。并且进行了模块化设计和组装。它的其余部分(例如腿部)等需要肌肉驱动的关节都可以利用模块化设计组装。在机器人的每一个关节里包含有位置传感器,IMU等传感器,能够读取到每一个关节的角度和姿态。
机械手模块化设计说明

变刚度手臂
为了尽可能的模仿人类驾驶员的特性,研究者没有采用3d扫描传感器,而是在Musashi的头部具有两只可动2维摄像机充当眼睛,可以左右和上下旋转,主要作用是采集图像信息用于识别。
Musashi的手指采用弹簧柔性结构设计。当两边线都收紧式,手指处于大刚度状态。这款机械手在冲击下不会被损坏,另外在指尖部位和手掌部分都有用来检测接触的压力传感器。
Musashi的足部有着6维力传感器,分别分布在脚趾和脚后跟处,可以全面感知脚受到的力的大小和方向。
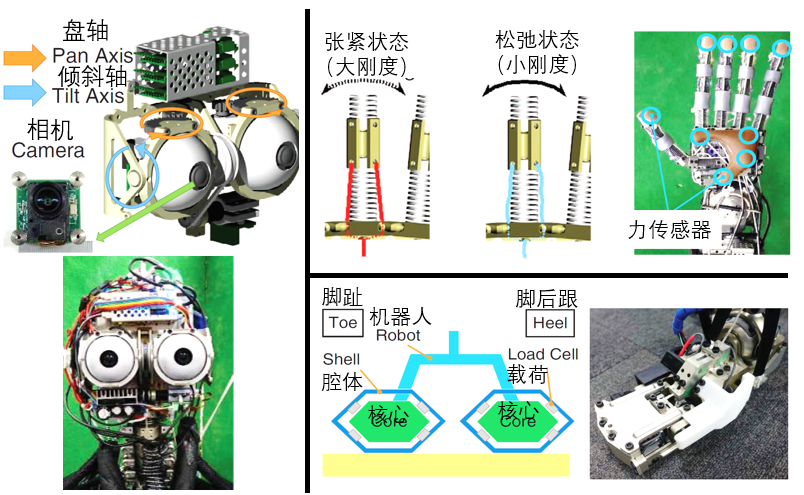
细节设计:眼部设计,变刚度机械手,足部传感
借助于高度拟人化的硬件设计,Musashi可以实现以下功能和动作。首先它可以完美的坐到一部小型家用电动车中。可以通过头部和眼球的转动识别周围的环境,例如通过后视镜的反射可以识别人类;柔性机械臂和机械手可以抓握方向盘并且进行转向操作。

基本动作和功能:后视镜人像识别和双手转方向盘
另外Musashi也可以完成例如拧车钥匙,以及拉手刹等在驾驶过程中一些必备的,看似简单,实际对大多数机器人来说比较难以在狭小空间完成的基本动作。
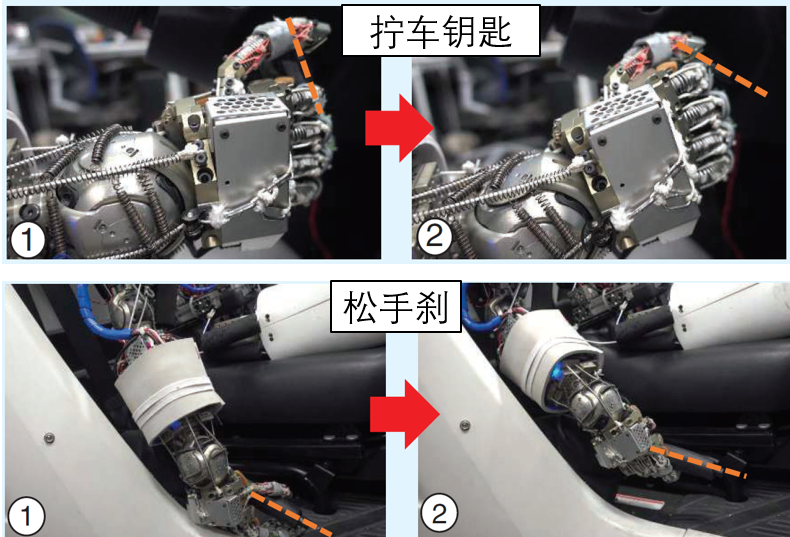
基本动作:拧车钥匙和拉手刹
借助于足部的传感器和腿的设计,Musashi可以实现踩油门和踩刹车的功能。另外当足部上方被刹车油门卡住后,力传感器可以检测出,从而让Musashi做出反应,避开刹车油门的干扰。

基本动作:踩油门,踩刹车
在具备了柔性的身体结构和冗余传感信息,为了实现机器人驾驶汽车的功能,研究者们采用一种基于机器学习(learning based)的运动生成,基于机器学习的识别,以及基于快速反射弧的控制方法,详细的机器学习算法请参照具体论文。
研究者规定了一些基本的驾驶汽车的动作,将他们分为两种类别,静态行为和动态行为。静态行为指的是转方向盘,研究者用在线学习的方式,训练机器人掌握操作方向盘的行为,图中显示出了方向盘角度和肌肉张力随着时间的变化规律。
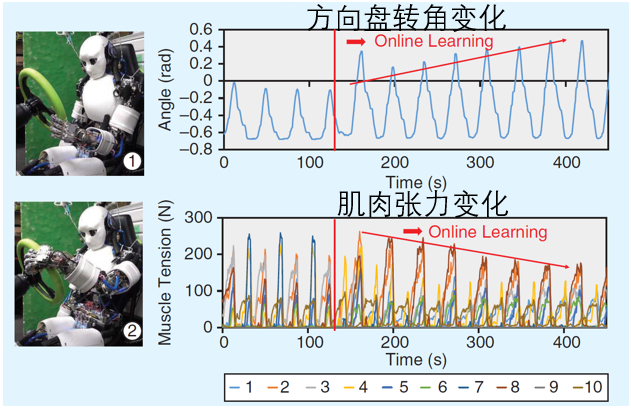
转方向盘在线机器学习
踩油门和刹车是需要机器人做出快速响应的,例如在红绿灯状态下的启动和刹车,以及在前方有行人时的刹车。研究者采用离线学习的方式来训练机器人的动态响应。

踩油门训练
在识别部分,像人类驾驶员一样,研究者主要利用机器学习训练识别了视觉和声音信息,通过训练,可以识别物体信息和声音信息,例如,汽车,人,交通灯,以及喇叭声等。研究者进行测试的场地是在车人非常稀少的街道上。
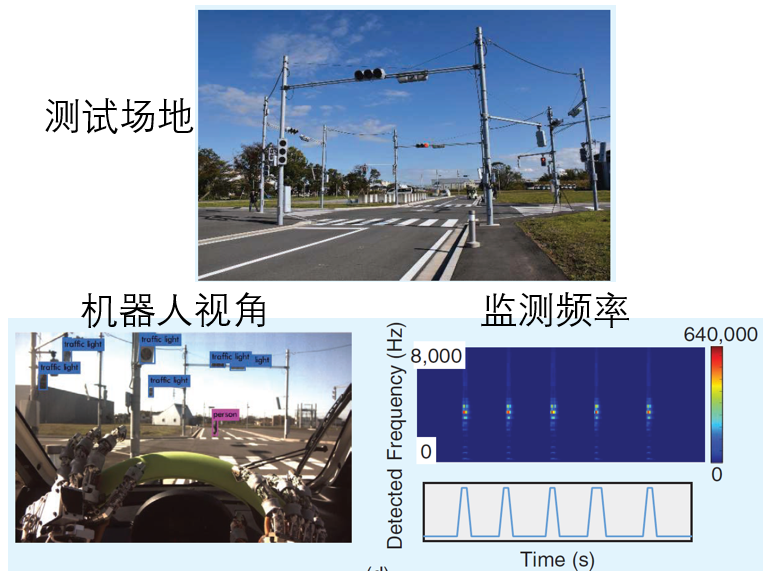
测试场地和机器人视觉识别
Musashi驾驶一辆小型改装的电动车进行试验。其中,能源和计算机控制中枢都被安装于车厢尾部,另外还包括一个无线通讯模块。为了安全起见,该车辆的电机扭矩被限制在5Nm之内,同时有一个应急按钮以防止出危险。

驾驶汽车上配置电源和计算机
Musashi可以通过简单的反射弧控制算法来对外界做出反应。研究者展示了一个很经典的场景,即在车辆前方有人或者汽车通过时,快速踩下刹车做出反应。基于Musashi的识别系统,它可以有效地识别在前方通过的人,以及即将到来的汽车,并做出反应。研究者指出,为了让机器人的控制系统更加智能,在更多的环境中去训练机器人的识别模型时非常有必要的。

驾驶过程中的鸣笛声或者人类检测
另一个测试场景是让Musashi自动驾驶通过一个有着红绿灯的十字路口。在这项实验中,Musashi的驾驶速度非常的缓慢(5km/s)。当十字路口的等变为绿色时,操作人员对机器人发出转弯的指令,Musashi可以驾驶小车用双手实现90度的转弯。整个过程持续大约2分钟,相对来说比较缓慢和不流畅。

驾驶过程中的红绿灯检测
三. 总结与未来展望
虽然自动驾驶汽车要比用“人形机器人”驾驶汽车更为可靠,更舒适,更安全,但是小编相信,对于“人形机器人“的诸如此类的深入研究还是有很重要和深远意义的。驾驶汽车这项任务将机器人束缚在一个极其复杂的环境中,需要机器人去操作方向盘,踩油门,拉手刹,拨转向灯等。无疑来说是一项很有挑战性的任务。进行相关的研究可以极大的促进”人形机器人“的发展。
本文的研究者指出,当前的研究还有很多方面需要改进,例如在脚踏板的操作和方向盘的操作方面,都不够顺滑,以及速度较慢,远远没有办法和人类进行比较。同时机器人的识别模型还需要进一步的完善和强化,以适应更复杂的环境。在未来的研究中,研究者会考虑让机器人尝试不同的汽车,从而进一步提升人形机器人的性能。
相关论文信息:
Kawaharazuka, K., Tsuzuki, K., Koga, Y., Omura, Y., Makabe,T., Shinjo, K.,Kawasaki, K. (2020). Toward Autonomous Driving byMusculoskeletal Humanoids: Study of Developed Hardware and Learning-basedSoftware. IEEE Robotics & Automation Magazine.
东京大学人形机器人论文:
Asano, Y., Okada, K., & Inaba, M. (2017). Designprinciples of a human mimetic humanoid: Humanoid platform to study humanintelligence and internal body system. Science Robotics, 2(13),eaaq0899.













